第3节 汽车人小白—机械臂
使用ESP8266,通过网页端发送命令,控制多个舵机
活动目标
- 了解舵机的基本概念
- 了解使用开发板控制动力设备的基本原理
- 熟悉使用Arduino IDE烧录固件的操作流程
背景知识:舵机
伺服电机通常被称为舵机,它是一种带有输出轴的小装置。当我们向伺服器发送一个控制信号时,输出轴就可以转到特定的位置。只要控制信号持续不变,伺服机构就会保持轴的角度位置不改变。如果控制信号发生变化,输出轴的位置也会相应发生变化。日常生活中,舵机常被用于遥控飞机、遥控汽车、机器人等。

舵机内部的控制电路、电位计(可变电阻器)和电机均被连接到电路板上。控制电路通过电位计可监控舵机的当前角度。
其工作流程为:控制信号 → 控制电路板 → 电机转动 → 齿轮组减速 → 舵盘转动 → 位置反馈电位计 → 控制电路板反馈。

1.脉冲宽度调制(PWM)
脉冲宽度调制,英文名Pulse Width Modulation,缩写为PWM,它是通过对一系列脉冲的宽度进行调制,等效出所需要的波形,对模拟信号电平进行数字编码。
2.占空比
占空比是指在一个周期内,信号处于高电平的时间占据整个信号周期的百分比。

上图信号一个周期的时间为4ms,其中高电平时间为1ms。占空比为:
原理图
舵机机械臂->小白: GPIO
小白->手机浏览器: 1.建立局域网服务器
手机浏览器-->小白: 2.通过WiFi访问控制界面
手机浏览器-->小白: 3.提交执行舵机角度请求
小白->手机浏览器: 4.服务器响应请求,让小白的动力系统执行
硬件清单
- ESP8266主板
- 电机扩展板 esp12E Motor Shield
- 舵机
- 杜邦线、数据线
- 机械臂和零件
实验:机械臂
1.硬件连接

黄色-信号D(DATA)
红色-正极V(VCC)
棕色-负极G(GND)
2.烧录程序到开发板
1).打开项目文件夹learn-ai/codes/chapter3/part3_ServoArm/ESP8266_servoarm_http
2).将ESP8266通过数据线连接到电脑
3).使用Arduino IDE打开文件ESP8266_servoarm_http.ino
4).记得把前面的环境准备部分再次确认,将环境正确配置,然后点击上传按钮进行上传
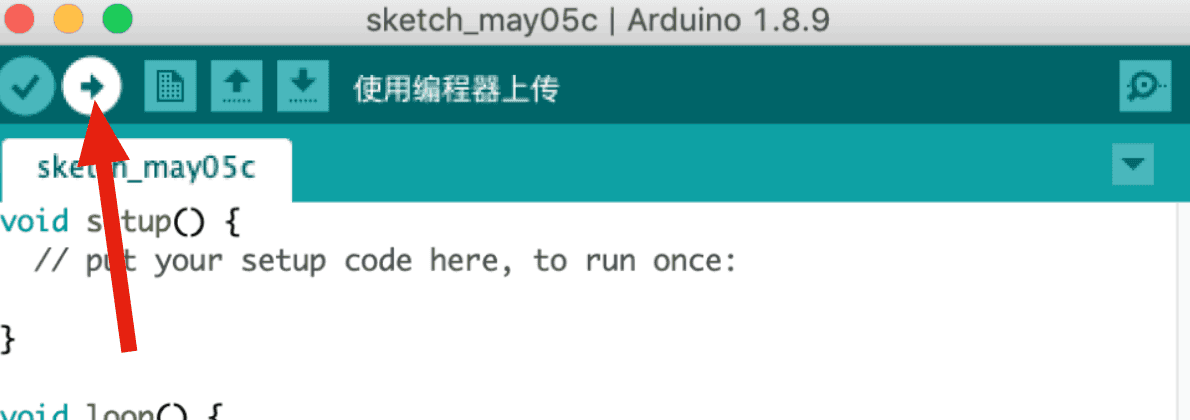 5).点击
5).点击工具菜单,选择ESP8266 Sketch Data Upload,会自动将项目目录下的data文件夹上传到ESP8266开发板上
3.开始机械臂控制
1).打开路由器管理地址,ESP8266此时应该已经加入到了局域网中,查看ESP8266获取到的路由器地址
2).将ESP8266与电脑连接断开,连接到移动电源上
3).在浏览器中打开ESP8266获取到的局域网地址,通过拖动滑块来控制机械臂
4).通过内网转发技术,同学们在家里可以打开这里来查看老师手边传感器的实时读数。
